GPU610/DPS915 | Student List | Group and Project Index | Student Resources | Glossary
Group 6
Team Members
- Xiaowei Huang
- Yihang Yuan
- Zhijian Zhou
Email All
Progress
Assignment 1 - Select and Assess
Array Processing
Subject: Array Processing
Blaise Barney introduced Parallel Computing https://computing.llnl.gov/tutorials/parallel_comp/
Array processing could become one of the parallel example, which "demonstrates calculations on 2-dimensional array elements; a function is evaluated on each array element."
Here is my source code
| [Expand] arrayProcessing.cpp
|
// arrayProcessing.cpp
// Array processing implement parallel solution
#include <iostream>
#include <iomanip>
#include <cstdlib>
#include <ctime>
void init(float** randomValue, int n) {
//std::srand(std::time(nullptr));
float f = 1.0f / RAND_MAX;
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++)
randomValue[i][j] = std::rand() * f;
}
void multiply(float** a, float** b, float** c, int n) {
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++) {
float sum = 0.0f;
for (int k = 0; k < n; k++)
sum += a[i][k] * b[k][j];
c[i][j] = sum;
if(n <= 10){
std::cout << "array c[" << i << "," << j << "]: " << c[i][j] << std::endl;
}
}
}
int main(int argc, char* argv[]) {
// interpret command-line argument
if (argc != 2) {
std::cerr << argv[0] << ": invalid number of arguments\n";
std::cerr << "Usage: " << argv[0] << " size_of_matrices\n";
return 1;
}
int n = std::atoi(argv[1]); // size of matrices
float** a = new float*[n];
for (int i = 0; i < n; i++)
a[i] = new float[n];
float** b = new float*[n];
for (int i = 0; i < n; i++)
b[i] = new float[n];
float** c = new float*[n];
for (int i = 0; i < n; i++)
c[i] = new float[n];
std::srand(std::time(nullptr));
init(a, n);
init(b, n);
multiply(a, b, c, n);
for (int i = 0; i < n; i++)
delete [] a[i];
delete [] a;
for (int i = 0; i < n; i++)
delete [] b[i];
delete [] b;
for (int i = 0; i < n; i++)
delete [] c[i];
delete [] c;
}
|
Standard random method is used to initialize a 2-dimentional array. The purpose of this program is to perform a 2-dimension array calculation, which is a matrix-matrix multiplication in this example.
In this following profile example, n = 1000
Flat profile:
Each sample counts as 0.01 seconds.
% cumulative self self total
time seconds seconds calls Ts/call Ts/call name
100.11 1.48 1.48 multiply(float**, float**, float**, int)
0.68 1.49 0.01 init(float**, int)
0.00 1.49 0.00 1 0.00 0.00 _GLOBAL__sub_I__Z4initPPfi
Call graph
granularity: each sample hit covers 2 byte(s) for 0.67% of 1.49 seconds
index % time self children called name
<spontaneous>
[1] 99.3 1.48 0.00 multiply(float**, float**, float**, int) [1]
-----------------------------------------------
<spontaneous>
[2] 0.7 0.01 0.00 init(float**, int) [2]
-----------------------------------------------
0.00 0.00 1/1 __libc_csu_init [16]
[10] 0.0 0.00 0.00 1 _GLOBAL__sub_I__Z4initPPfi [10]
-----------------------------------------------
�
Index by function name
[10] _GLOBAL__sub_I__Z4initPPfi (arrayProcessing.cpp) [2] init(float**, int) [1] multiply(float**, float**, float**, int)
From the call graph, multiply() took major runtime to more than 99%, as it contains 3 for-loop, which T(n) is O(n^3). Besides, init() also became the second busy one, which has a O(n^2).
As the calculation of elements is independent of one another - leads to an embarrassingly parallel solution. Arrays elements are evenly distributed so that each process owns a portion of the array (subarray). It can be solved in less time with multiple compute resources than with a single compute resource.
The Monte Carlo Simulation (PI Calculation)
Subject: The Monte Carlo Simulation (PI Calculation)
Got the code from here:
https://rosettacode.org/wiki/Monte_Carlo_methods#C.2B.2B
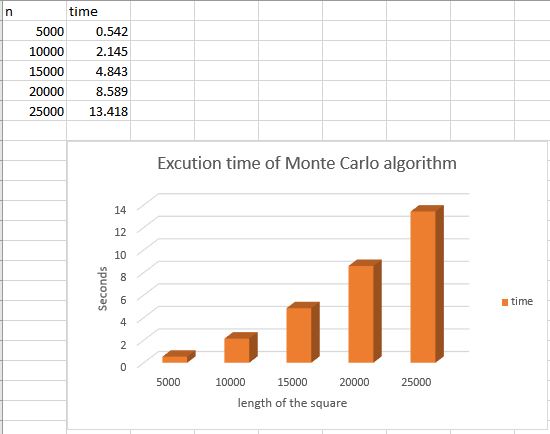
A Monte Carlo Simulation is a way of approximating the value of a function where calculating the actual value is difficult or impossible.
It uses random sampling to define constraints on the value and then makes a sort of "best guess."
| [Expand] Source Code
|
#include<iostream>
#include<fstream>
#include<math.h>
#include<stdlib.h>
#include<time.h>
using namespace std;
void calculatePI(int n, float* h_a) {
float x, y;
int hit;
srand(time(NULL));
for (int j = 0; j < n; j++) {
hit = 0;
x = 0;
y = 0;
for (int i = 0; i < n; i++) {
x = float(rand()) / float(RAND_MAX);
y = float(rand()) / float(RAND_MAX);
if (y <= sqrt(1 - (x * x))) {
hit += 1;
}
}
h_a[j] = 4 * float(hit) / float(n);
}
}
int main(int argc, char* argv[]) {
if (argc != 2) {
std::cerr << argv[0] << ": invalid number of arguments\n";
std::cerr << "Usage: " << argv[0] << " size_of_matrices\n";
return 1;
}
int n = std::atoi(argv[1]); // scale
float* cpu_a;
cpu_a = new float[n];
calculatePI(n, cpu_a);
ofstream h_file;
h_file.open("h_result.txt");
float cpuSum = 0.0f;
for (int i = 0; i < n; i++) {
cpuSum += cpu_a[i];
h_file << "Host: " << cpu_a[i] << endl;
}
cpuSum = cpuSum / (float)n;
cout << "CPU Result: " << cpuSum << endl;
h_file.close();
}
|
Zhijian
Subject:
Assignment 2 - Parallelize
Serial Algorithm:
void calculatePI(int n, float* h_a) {
float x, y;
int hit;
srand(time(NULL));
for (int j = 0; j < n; j++) {
hit = 0;
x = 0;
y = 0;
for (int i = 0; i < n; i++) {
x = float(rand()) / float(RAND_MAX);
y = float(rand()) / float(RAND_MAX);
if (y <= sqrt(1 - (x * x))) {
hit += 1;
}
}
h_a[j] = 4 * float(hit) / float(n);
}
}
Kernels for Parallel Algorithm:
__global__ void setRng(curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
curand_init(123456, idx, 0, &rng[idx]);
}
__global__ void calPI(float* d_a, int n, curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int counter = 0;
while (counter < n) {
float x = curand_uniform(&rng[idx]);
float y = curand_uniform(&rng[idx]);
if (y <= sqrt(1 - (x * x))) {
d_a[idx]++;
}
counter++;
}
d_a[idx] = 4.0 * (float(d_a[idx])) / float(n);
}
| [Expand] Full Code
|
#include<iostream>
#include<fstream>
#include<math.h>
#include<stdlib.h>
#include<time.h>
#include <chrono>
#include <cstdlib>
#include <iomanip>
#include <cuda_runtime.h>
#include <curand_kernel.h>
// to remove intellisense highlighting
#include <device_launch_parameters.h>
const int ntpb = 512;
using namespace std;
using namespace std::chrono;
void calculatePI(int n, float* h_a) {
float x, y;
int hit;
srand(time(NULL));
for (int j = 0; j < n; j++) {
hit = 0;
x = 0;
y = 0;
for (int i = 0; i < n; i++) {
x = float(rand()) / float(RAND_MAX);
y = float(rand()) / float(RAND_MAX);
if (y <= sqrt(1 - (x * x))) {
hit += 1;
}
}
h_a[j] = 4 * float(hit) / float(n);
}
}
__global__ void setRng(curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
curand_init(123456, idx, 0, &rng[idx]);
}
__global__ void calPI(float* d_a, int n, curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int counter = 0;
while (counter < n) {
float x = curand_uniform(&rng[idx]);
float y = curand_uniform(&rng[idx]);
if (y <= sqrt(1 - (x * x))) {
d_a[idx]++;
}
counter++;
}
d_a[idx] = 4.0 * (float(d_a[idx])) / float(n);
}
void reportTime(const char* msg, steady_clock::duration span) {
auto ms = duration_cast<milliseconds>(span);
std::cout << msg << " took - " <<
ms.count() << " millisecs" << std::endl;
}
int main(int argc, char* argv[]) {
if (argc != 2) {
std::cerr << argv[0] << ": invalid number of arguments\n";
std::cerr << "Usage: " << argv[0] << " size_of_matrices\n";
return 1;
}
int n = std::atoi(argv[1]); // scale
int nblks = (n + ntpb - 1) / ntpb;
cout << "scale: " << n << endl << endl;
steady_clock::time_point ts, te;
float* cpu_a;
cpu_a = new float[n];
ts = steady_clock::now();
calculatePI(n, cpu_a);
te = steady_clock::now();
reportTime("CPU", te - ts);
ofstream h_file;
h_file.open("h_result.txt");
float cpuSum = 0.0f;
for (int i = 0; i < n; i++) {
cpuSum += cpu_a[i];
h_file << "Host: " << cpu_a[i] << endl;
}
cpuSum = cpuSum / (float)n;
cout << "CPU Result: " << cpuSum << endl;
h_file.close();
cout << endl;
////////////////////////////////////////
curandState *d_rng;
float* d_a;
float* h_a;
h_a = new float[n];
cudaMalloc((void**)&d_a, n * sizeof(float));
cudaMalloc((void**)&d_rng, n * sizeof(curandState));
ts = steady_clock::now();
setRng << < nblks, ntpb >> > (d_rng);
cudaDeviceSynchronize(); // synchronize [new added]
calPI << <nblks, ntpb >> > (d_a, n, d_rng);
cudaDeviceSynchronize();
te = steady_clock::now();
reportTime("GPU", te - ts);
cudaMemcpy(h_a, d_a, n * sizeof(float), cudaMemcpyDeviceToHost);
ofstream d_file;
d_file.open("d_result.txt");
float gpuSum = 0.0f;
for (int i = 0; i < n; i++) {
gpuSum += h_a[i];
d_file << "Device: " << h_a[i] << endl;
}
gpuSum = gpuSum / (float)n;
cout << "GPU Result: " << gpuSum << endl;
d_file.close();
delete[] cpu_a;
delete[] h_a;
cudaFree(d_a);
cudaFree(d_rng);
}
|
Result:
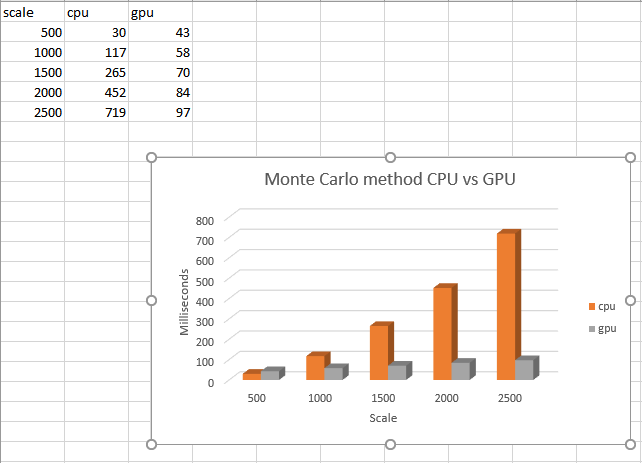
In conclusion, by parallelized the serial version of the algorithm, we see an immediate improvement of performance.
Assignment 3 - Optimize
Here is my final source code
| [Expand] p03_reduction.cu
|
// part 3.1 : reduction
// update 2:
// add comments to all kernels
// mdf kernel 2 only returns the numbers of dot inside the quadrant, and this number passes to next blocks
// new kernel 3 sums the elements of d_a as generated by the kernel 2, and accumulate the block sums
// new kernel 4 sums all block PI value before passing back to host
#include<iostream>
#include<fstream>
#include<math.h>
#include<stdlib.h>
#include<time.h>
#include <chrono>
#include <cstdlib>
#include <iomanip>
#include <cuda_runtime.h>
#include <curand_kernel.h>
// to remove intellisense highlighting
#include <device_launch_parameters.h>
#ifndef __CUDACC__
#define __CUDACC__
#endif
#include <device_functions.h>
using namespace std;
using namespace std::chrono;
const int ntpb = 512;
// this function uses to calculate PI on CPU
void calculatePI(int n, float* h_a) {
float x, y;
int hit;
srand(time(NULL));
for (int j = 0; j < n; j++) {
hit = 0;
x = 0;
y = 0;
for (int i = 0; i < n; i++) {
x = float(rand()) / float(RAND_MAX);
y = float(rand()) / float(RAND_MAX);
if (y <= sqrt(1 - (x * x))) {
hit += 1;
}
}
h_a[j] = 4 * float(hit) / float(n);
}
}
// kernel 1
// The first kernel uses to generate random numbers
__global__ void setRng(curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
curand_init(123456, idx, 0, &rng[idx]);
}
// kernel 2
// The second kernel identifis the dot location (use the kernel 1 passed random number to create)
// whether it is been in the quadrant or not
__global__ void calPI(float* d_a, int n, curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int counter = 0; // this variable counts the total number of dot be placed
unsigned int hit = 0; // this variable counts the number of dot inside the cirle
// in one Threat, it generates n dots
while (counter < n) {
float x = curand_uniform(&rng[idx]);
float y = curand_uniform(&rng[idx]);
if (y*y <= (1 - (x * x))) {
hit++;
}
counter++;
}
d_a[idx] = 4.0 * (float(hit)) / float(n);
}
// kernel 3
// the third kernel sum the result in each block
__global__ void sumPi(float* d_a, float*d_b, const int n) {
int i = blockIdx.x * blockDim.x + threadIdx.x;
int t = threadIdx.x;
__shared__ float s[ntpb];
s[t] = d_a[i];
__syncthreads();
// sum the data in shared memory
for (int stride = 1; stride < blockDim.x; stride <<= 1) {
if ((t % (2 * stride) == 0) && (i + stride < n)) {
s[t] += s[t + stride];
}
__syncthreads();
}
// store the sum in d_b;
if (t == 0) {
d_b[blockIdx.x] = s[0];
}
}
// kernel 4
// the forth kernel sum the result of all blocks
__global__ void accumulate(float* c, const int nblocks) {
// store the elements of c[] in shared memory
int i = blockIdx.x * blockDim.x + threadIdx.x;
int t = threadIdx.x;
__shared__ float s[ntpb];
s[t] = c[i];
__syncthreads();
// sum the data in shared memory
for (int stride = 1; stride < blockDim.x; stride <<= 1) {
if ((t % (2 * stride) == 0) && (i + stride < nblocks)) {
s[t] += s[t + stride];
}
__syncthreads();
}
// store the sum in c[0]
if (t == 0) {
c[blockIdx.x] = s[0];
}
}
void reportTime(const char* msg, steady_clock::duration span) {
auto ms = duration_cast<milliseconds>(span);
std::cout << msg << " took - " <<
ms.count() << " millisecs" << std::endl;
}
int main(int argc, char* argv[]) {
if (argc != 2) {
std::cerr << argv[0] << ": invalid number of arguments\n";
std::cerr << "Usage: " << argv[0] << " size_of_matrices\n";
return 1;
}
int n = std::atoi(argv[1]); // scale
int nblks = (n + ntpb - 1) / ntpb;
cout << "scale: " << n << endl << endl;
steady_clock::time_point ts, te;
float* cpu_a;
cpu_a = new float[n];
ts = steady_clock::now();
calculatePI(n, cpu_a);
te = steady_clock::now();
reportTime("CPU", te - ts);
ofstream h_file;
h_file.open("h_result.txt");
float cpuSum = 0.0f;
for (int i = 0; i < n; i++) {
cpuSum += cpu_a[i];
h_file << "Host: " << cpu_a[i] << endl;
}
cpuSum = cpuSum / (float)n;
cout << "CPU Result: " << cpuSum << endl;
h_file.close();
cout << endl;
////////////////////////////////////////
curandState *d_rng;
float* d_a;
float* d_b;
float* h_a;
h_a = new float[n];
cudaMalloc((void**)&d_a, n * sizeof(float));
cudaMalloc((void**)&d_b, n * sizeof(float));
cudaMalloc((void**)&d_rng, n * sizeof(curandState));
ts = steady_clock::now();
setRng << < nblks, ntpb >> > (d_rng);
cudaDeviceSynchronize();
// calculate PI in each thread and pass its value
calPI << <nblks, ntpb >> > (d_a, n, d_rng);
cudaDeviceSynchronize();
// sum PI in total and pass back on the device
sumPi << <nblks, ntpb >> > (d_a, d_b, n);
cudaDeviceSynchronize();
// accumulate the block sums
accumulate << <1, nblks >> >(d_b, nblks);
cudaDeviceSynchronize();
te = steady_clock::now();
reportTime("GPU", te - ts);
// host h_a only receives one element from device d_b
cudaMemcpy(h_a, d_b, n * sizeof(float), cudaMemcpyDeviceToHost);
ofstream d_file;
d_file.open("d_result.txt");
float gpuSum = 0.0f;
gpuSum = h_a[0] / (float)n;
cout << "GPU Result: " << gpuSum << "\n \n"<< endl;
d_file.close();
cudaFree(d_a);
cudaFree(d_rng);
delete[] cpu_a;
delete[] h_a;
// reset the device
cudaDeviceReset();
}
|

