GPU610/DPS915 | Student List | Group and Project Index | Student Resources | Glossary
Group 6
Team Members
- Xiaowei Huang
- Yihang Yuan
Email All
Progress
Assignment 1 - Select and Assess
Array Processing
Subject: Array Processing
Blaise Barney introduced Parallel Computing https://computing.llnl.gov/tutorials/parallel_comp/
Array processing could become one of the parallel example, which "demonstrates calculations on 2-dimensional array elements; a function is evaluated on each array element."
Here is my source code
| [Expand] arrayProcessing.cpp
|
// arrayProcessing.cpp
// Array processing implement parallel solution
#include <iostream>
#include <iomanip>
#include <cstdlib>
#include <ctime>
void init(float** randomValue, int n) {
//std::srand(std::time(nullptr));
float f = 1.0f / RAND_MAX;
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++)
randomValue[i][j] = std::rand() * f;
}
void multiply(float** a, float** b, float** c, int n) {
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++) {
float sum = 0.0f;
for (int k = 0; k < n; k++)
sum += a[i][k] * b[k][j];
c[i][j] = sum;
if(n <= 10){
std::cout << "array c[" << i << "," << j << "]: " << c[i][j] << std::endl;
}
}
}
int main(int argc, char* argv[]) {
// interpret command-line argument
if (argc != 2) {
std::cerr << argv[0] << ": invalid number of arguments\n";
std::cerr << "Usage: " << argv[0] << " size_of_matrices\n";
return 1;
}
int n = std::atoi(argv[1]); // size of matrices
float** a = new float*[n];
for (int i = 0; i < n; i++)
a[i] = new float[n];
float** b = new float*[n];
for (int i = 0; i < n; i++)
b[i] = new float[n];
float** c = new float*[n];
for (int i = 0; i < n; i++)
c[i] = new float[n];
std::srand(std::time(nullptr));
init(a, n);
init(b, n);
multiply(a, b, c, n);
for (int i = 0; i < n; i++)
delete [] a[i];
delete [] a;
for (int i = 0; i < n; i++)
delete [] b[i];
delete [] b;
for (int i = 0; i < n; i++)
delete [] c[i];
delete [] c;
}
|
Standard random method is used to initialize a 2-dimentional array. The purpose of this program is to perform a 2-dimension array calculation, which is a matrix-matrix multiplication in this example.
In this following profile example, n = 1000
Flat profile:
Each sample counts as 0.01 seconds.
% cumulative self self total
time seconds seconds calls Ts/call Ts/call name
100.11 1.48 1.48 multiply(float**, float**, float**, int)
0.68 1.49 0.01 init(float**, int)
0.00 1.49 0.00 1 0.00 0.00 _GLOBAL__sub_I__Z4initPPfi
Call graph
granularity: each sample hit covers 2 byte(s) for 0.67% of 1.49 seconds
index % time self children called name
<spontaneous>
[1] 99.3 1.48 0.00 multiply(float**, float**, float**, int) [1]
-----------------------------------------------
<spontaneous>
[2] 0.7 0.01 0.00 init(float**, int) [2]
-----------------------------------------------
0.00 0.00 1/1 __libc_csu_init [16]
[10] 0.0 0.00 0.00 1 _GLOBAL__sub_I__Z4initPPfi [10]
-----------------------------------------------
�
Index by function name
[10] _GLOBAL__sub_I__Z4initPPfi (arrayProcessing.cpp) [2] init(float**, int) [1] multiply(float**, float**, float**, int)
From the call graph, multiply() took major runtime to more than 99%, as it contains 3 for-loop, which T(n) is O(n^3). Besides, init() also became the second busy one, which has a O(n^2).
As the calculation of elements is independent of one another - leads to an embarrassingly parallel solution. Arrays elements are evenly distributed so that each process owns a portion of the array (subarray). It can be solved in less time with multiple compute resources than with a single compute resource.
The Monte Carlo Simulation (PI Calculation)
The Monte Carlo Simulation (PI Calculation)
Got the code from here:
https://rosettacode.org/wiki/Monte_Carlo_methods#C.2B.2B
A Monte Carlo Simulation is a way of approximating the value of a function where calculating the actual value is difficult or impossible.
It uses random sampling to define constraints on the value and then makes a sort of "best guess."
| [Expand] Source Code
|
#include<iostream>
#include<fstream>
#include<math.h>
#include<stdlib.h>
#include<time.h>
using namespace std;
void calculatePI(int n, float* h_a) {
float x, y;
int hit;
srand(time(NULL));
for (int j = 0; j < n; j++) {
hit = 0;
x = 0;
y = 0;
for (int i = 0; i < n; i++) {
x = float(rand()) / float(RAND_MAX);
y = float(rand()) / float(RAND_MAX);
if (y <= sqrt(1 - (x * x))) {
hit += 1;
}
}
h_a[j] = 4 * float(hit) / float(n);
}
}
int main(int argc, char* argv[]) {
if (argc != 2) {
std::cerr << argv[0] << ": invalid number of arguments\n";
std::cerr << "Usage: " << argv[0] << " size_of_matrices\n";
return 1;
}
int n = std::atoi(argv[1]); // scale
float* cpu_a;
cpu_a = new float[n];
calculatePI(n, cpu_a);
ofstream h_file;
h_file.open("h_result.txt");
float cpuSum = 0.0f;
for (int i = 0; i < n; i++) {
cpuSum += cpu_a[i];
h_file << "Host: " << cpu_a[i] << endl;
}
cpuSum = cpuSum / (float)n;
cout << "CPU Result: " << cpuSum << endl;
h_file.close();
}
|
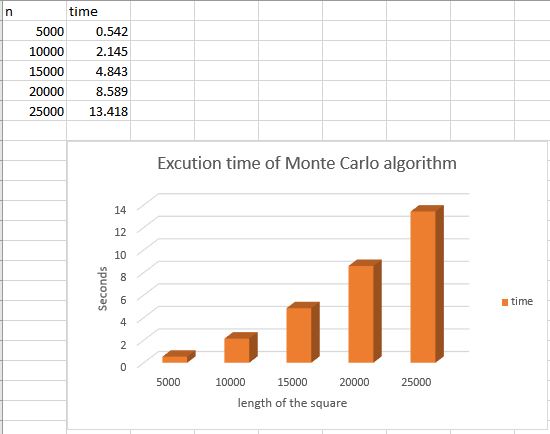
As this algorithm is based on random sampling, so there is only one function that does all the work.
Flat profile:
Each sample counts as 0.01 seconds.
% cumulative self self total
time seconds seconds calls Ts/call Ts/call name
101.05 0.02 0.02 calculatePI(int, float*)
0.00 0.02 0.00 1 0.00 0.00 _GLOBAL__sub_I__Z11calculatePIiPf
Call graph
granularity: each sample hit covers 2 byte(s) for 0.47% of 2.11 seconds
index % time self children called name
<spontaneous>
[1] 100.0 2.11 0.00 calculatePI(int, float*) [1]
-----------------------------------------------
0.00 0.00 1/1 __libc_csu_init [17]
[9] 0.0 0.00 0.00 1 _GLOBAL__sub_I__Z11calculatePIiPf [9]
-----------------------------------------------
�
Index by function name
[9] _GLOBAL__sub_I__Z11calculatePIiPf (a1.cpp) [1] calculatePI(int, float*)
Results for different scale of calculation
Assignment 2 - Parallelize
Serial Algorithm:
void calculatePI(int n, float* h_a) {
float x, y;
int hit;
srand(time(NULL));
for (int j = 0; j < n; j++) {
hit = 0;
x = 0;
y = 0;
for (int i = 0; i < n; i++) {
x = float(rand()) / float(RAND_MAX);
y = float(rand()) / float(RAND_MAX);
if (y <= sqrt(1 - (x * x))) {
hit += 1;
}
}
h_a[j] = 4 * float(hit) / float(n);
}
}
Kernels for Parallel Algorithm:
__global__ void setRng(curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
curand_init(123456, idx, 0, &rng[idx]);
}
__global__ void calPI(float* d_a, int n, curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int counter = 0;
while (counter < n) {
float x = curand_uniform(&rng[idx]);
float y = curand_uniform(&rng[idx]);
if (y <= sqrt(1 - (x * x))) {
d_a[idx]++;
}
counter++;
}
d_a[idx] = 4.0 * (float(d_a[idx])) / float(n);
}
| [Expand] Full Code
|
#include<iostream>
#include<fstream>
#include<math.h>
#include<stdlib.h>
#include<time.h>
#include <chrono>
#include <cstdlib>
#include <iomanip>
#include <cuda_runtime.h>
#include <curand_kernel.h>
// to remove intellisense highlighting
#include <device_launch_parameters.h>
const int ntpb = 512;
using namespace std;
using namespace std::chrono;
void calculatePI(int n, float* h_a) {
float x, y;
int hit;
srand(time(NULL));
for (int j = 0; j < n; j++) {
hit = 0;
x = 0;
y = 0;
for (int i = 0; i < n; i++) {
x = float(rand()) / float(RAND_MAX);
y = float(rand()) / float(RAND_MAX);
if (y <= sqrt(1 - (x * x))) {
hit += 1;
}
}
h_a[j] = 4 * float(hit) / float(n);
}
}
__global__ void setRng(curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
curand_init(123456, idx, 0, &rng[idx]);
}
__global__ void calPI(float* d_a, int n, curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int counter = 0;
while (counter < n) {
float x = curand_uniform(&rng[idx]);
float y = curand_uniform(&rng[idx]);
if (y <= sqrt(1 - (x * x))) {
d_a[idx]++;
}
counter++;
}
d_a[idx] = 4.0 * (float(d_a[idx])) / float(n);
}
void reportTime(const char* msg, steady_clock::duration span) {
auto ms = duration_cast<milliseconds>(span);
std::cout << msg << " took - " <<
ms.count() << " millisecs" << std::endl;
}
int main(int argc, char* argv[]) {
if (argc != 2) {
std::cerr << argv[0] << ": invalid number of arguments\n";
std::cerr << "Usage: " << argv[0] << " size_of_matrices\n";
return 1;
}
int n = std::atoi(argv[1]); // scale
int nblks = (n + ntpb - 1) / ntpb;
cout << "scale: " << n << endl << endl;
steady_clock::time_point ts, te;
float* cpu_a;
cpu_a = new float[n];
ts = steady_clock::now();
calculatePI(n, cpu_a);
te = steady_clock::now();
reportTime("CPU", te - ts);
ofstream h_file;
h_file.open("h_result.txt");
float cpuSum = 0.0f;
for (int i = 0; i < n; i++) {
cpuSum += cpu_a[i];
h_file << "Host: " << cpu_a[i] << endl;
}
cpuSum = cpuSum / (float)n;
cout << "CPU Result: " << cpuSum << endl;
h_file.close();
cout << endl;
////////////////////////////////////////
curandState *d_rng;
float* d_a;
float* h_a;
h_a = new float[n];
cudaMalloc((void**)&d_a, n * sizeof(float));
cudaMalloc((void**)&d_rng, n * sizeof(curandState));
ts = steady_clock::now();
setRng << < nblks, ntpb >> > (d_rng);
cudaDeviceSynchronize(); // synchronize [new added]
calPI << <nblks, ntpb >> > (d_a, n, d_rng);
cudaDeviceSynchronize();
te = steady_clock::now();
reportTime("GPU", te - ts);
cudaMemcpy(h_a, d_a, n * sizeof(float), cudaMemcpyDeviceToHost);
ofstream d_file;
d_file.open("d_result.txt");
float gpuSum = 0.0f;
for (int i = 0; i < n; i++) {
gpuSum += h_a[i];
d_file << "Device: " << h_a[i] << endl;
}
gpuSum = gpuSum / (float)n;
cout << "GPU Result: " << gpuSum << endl;
d_file.close();
delete[] cpu_a;
delete[] h_a;
cudaFree(d_a);
cudaFree(d_rng);
}
|
Result:
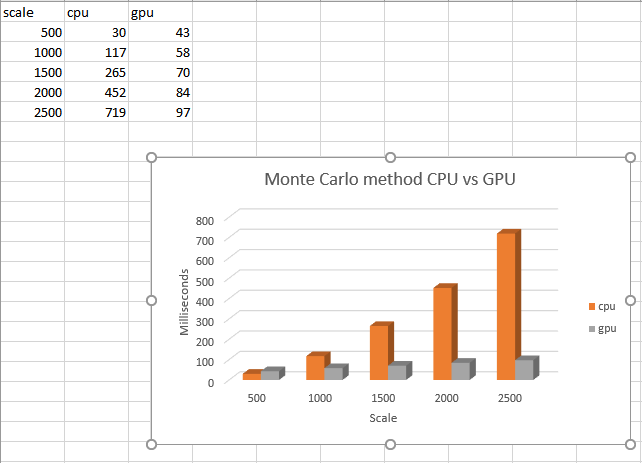
In conclusion, by parallelized the serial version of the algorithm, we see an immediate improvement of performance.
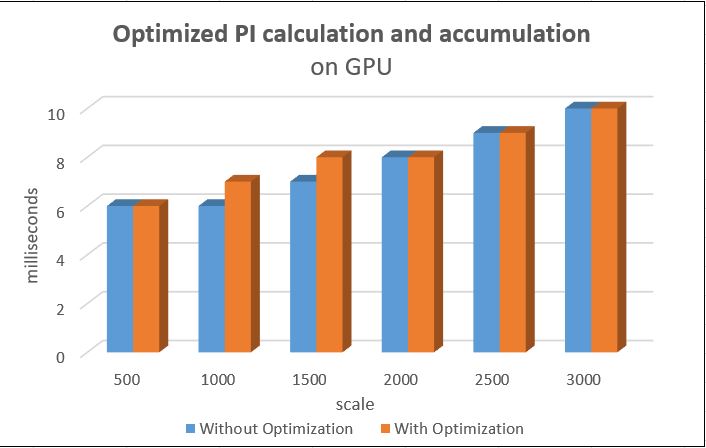
Assignment 3 - Optimize
The main kernel optimization did on 2 parts
The new third kernel is to sum up the PI results which generated in each block, by applying serial reduction algorithm which could reduce its Big-O classification is O(log n). Beside, it also sets the limitation to check whether the calculation is out of the range. As it can stop the sum-up to those useless thread value. And the total value of that block is passed to the first element of that block.
// kernel 3
// the third kernel sum the result in each block
__global__ void sumPi(float* d_a, float*d_b, const int n) {
int i = blockIdx.x * blockDim.x + threadIdx.x;
int t = threadIdx.x;
__shared__ float s[ntpb];
s[t] = d_a[i];
__syncthreads();
// sum the data in shared memory
for (int stride = 1; stride < blockDim.x; stride <<= 1) {
if ((t % (2 * stride) == 0) && (i + stride < n)) {
s[t] += s[t + stride];
}
__syncthreads();
}
// store the sum in d_b;
if (t == 0) {
d_b[blockIdx.x] = s[0];
}
}
To reduce the data transfer from device to host, the new forth kernel is created. It uses to sum up all blocks results from passing back to the host, which also applies the reduction algorithm.
// kernel 4
// the forth kernel sum the result of all blocks
__global__ void accumulate(float* c, const int nblocks) {
// store the elements of c[] in shared memory
int i = blockIdx.x * blockDim.x + threadIdx.x;
int t = threadIdx.x;
__shared__ float s[ntpb];
s[t] = c[i];
__syncthreads();
// sum the data in shared memory
for (int stride = 1; stride < blockDim.x; stride <<= 1) {
if ((t % (2 * stride) == 0) && (i + stride < nblocks)) {
s[t] += s[t + stride];
}
__syncthreads();
}
// store the sum in c[0]
if (t == 0) {
c[blockIdx.x] = s[0];
}
}
Even though the runtime is closed after implementing the optimization, the kernels has a heavy load than before. It also finishes the accumulation of all randomly generated PI. I consider this optimization performs well.
Here is my final source code
| [Expand] p03_reduction.cu
|
// part 3.1 : reduction
// update 2:
// add comments to all kernels
// mdf kernel 2 only returns the numbers of dot inside the quadrant, and this number passes to next blocks
// new kernel 3 sums the elements of d_a as generated by the kernel 2, and accumulate the block sums
// new kernel 4 sums all block PI value before passing back to host
#include<iostream>
#include<fstream>
#include<math.h>
#include<stdlib.h>
#include<time.h>
#include <chrono>
#include <cstdlib>
#include <iomanip>
#include <cuda_runtime.h>
#include <curand_kernel.h>
// to remove intellisense highlighting
#include <device_launch_parameters.h>
#ifndef __CUDACC__
#define __CUDACC__
#endif
#include <device_functions.h>
using namespace std;
using namespace std::chrono;
const int ntpb = 512;
// this function uses to calculate PI on CPU
void calculatePI(int n, float* h_a) {
float x, y;
int hit;
srand(time(NULL));
for (int j = 0; j < n; j++) {
hit = 0;
x = 0;
y = 0;
for (int i = 0; i < n; i++) {
x = float(rand()) / float(RAND_MAX);
y = float(rand()) / float(RAND_MAX);
if (y <= sqrt(1 - (x * x))) {
hit += 1;
}
}
h_a[j] = 4 * float(hit) / float(n);
}
}
// kernel 1
// The first kernel uses to generate random numbers
__global__ void setRng(curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
curand_init(123456, idx, 0, &rng[idx]);
}
// kernel 2
// The second kernel identifis the dot location (use the kernel 1 passed random number to create)
// whether it is been in the quadrant or not
__global__ void calPI(float* d_a, int n, curandState *rng) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int counter = 0; // this variable counts the total number of dot be placed
unsigned int hit = 0; // this variable counts the number of dot inside the cirle
// in one Threat, it generates n dots
while (counter < n) {
float x = curand_uniform(&rng[idx]);
float y = curand_uniform(&rng[idx]);
if (y*y <= (1 - (x * x))) {
hit++;
}
counter++;
}
d_a[idx] = 4.0 * (float(hit)) / float(n);
}
// kernel 3
// the third kernel sum the result in each block
__global__ void sumPi(float* d_a, float*d_b, const int n) {
int i = blockIdx.x * blockDim.x + threadIdx.x;
int t = threadIdx.x;
__shared__ float s[ntpb];
s[t] = d_a[i];
__syncthreads();
// sum the data in shared memory
for (int stride = 1; stride < blockDim.x; stride <<= 1) {
if ((t % (2 * stride) == 0) && (i + stride < n)) {
s[t] += s[t + stride];
}
__syncthreads();
}
// store the sum in d_b;
if (t == 0) {
d_b[blockIdx.x] = s[0];
}
}
// kernel 4
// the forth kernel sum the result of all blocks
__global__ void accumulate(float* c, const int nblocks) {
// store the elements of c[] in shared memory
int i = blockIdx.x * blockDim.x + threadIdx.x;
int t = threadIdx.x;
__shared__ float s[ntpb];
s[t] = c[i];
__syncthreads();
// sum the data in shared memory
for (int stride = 1; stride < blockDim.x; stride <<= 1) {
if ((t % (2 * stride) == 0) && (i + stride < nblocks)) {
s[t] += s[t + stride];
}
__syncthreads();
}
// store the sum in c[0]
if (t == 0) {
c[blockIdx.x] = s[0];
}
}
void reportTime(const char* msg, steady_clock::duration span) {
auto ms = duration_cast<milliseconds>(span);
std::cout << msg << " took - " <<
ms.count() << " millisecs" << std::endl;
}
int main(int argc, char* argv[]) {
if (argc != 2) {
std::cerr << argv[0] << ": invalid number of arguments\n";
std::cerr << "Usage: " << argv[0] << " size_of_matrices\n";
return 1;
}
int n = std::atoi(argv[1]); // scale
int nblks = (n + ntpb - 1) / ntpb;
cout << "scale: " << n << endl << endl;
steady_clock::time_point ts, te;
float* cpu_a;
cpu_a = new float[n];
ts = steady_clock::now();
calculatePI(n, cpu_a);
te = steady_clock::now();
reportTime("CPU", te - ts);
ofstream h_file;
h_file.open("h_result.txt");
float cpuSum = 0.0f;
for (int i = 0; i < n; i++) {
cpuSum += cpu_a[i];
h_file << "Host: " << cpu_a[i] << endl;
}
cpuSum = cpuSum / (float)n;
cout << "CPU Result: " << cpuSum << endl;
h_file.close();
cout << endl;
////////////////////////////////////////
curandState *d_rng;
float* d_a;
float* d_b;
float* h_a;
h_a = new float[n];
cudaMalloc((void**)&d_a, n * sizeof(float));
cudaMalloc((void**)&d_b, n * sizeof(float));
cudaMalloc((void**)&d_rng, n * sizeof(curandState));
ts = steady_clock::now();
setRng << < nblks, ntpb >> > (d_rng);
cudaDeviceSynchronize();
// calculate PI in each thread and pass its value
calPI << <nblks, ntpb >> > (d_a, n, d_rng);
cudaDeviceSynchronize();
// sum PI in total and pass back on the device
sumPi << <nblks, ntpb >> > (d_a, d_b, n);
cudaDeviceSynchronize();
// accumulate the block sums
accumulate << <1, nblks >> >(d_b, nblks);
cudaDeviceSynchronize();
te = steady_clock::now();
reportTime("GPU", te - ts);
// host h_a only receives one element from device d_b
cudaMemcpy(h_a, d_b, n * sizeof(float), cudaMemcpyDeviceToHost);
ofstream d_file;
d_file.open("d_result.txt");
float gpuSum = 0.0f;
gpuSum = h_a[0] / (float)n;
cout << "GPU Result: " << gpuSum << "\n \n"<< endl;
d_file.close();
cudaFree(d_a);
cudaFree(d_rng);
delete[] cpu_a;
delete[] h_a;
// reset the device
cudaDeviceReset();
}
|